Hand Assistive Device for Stroke Patients



Description
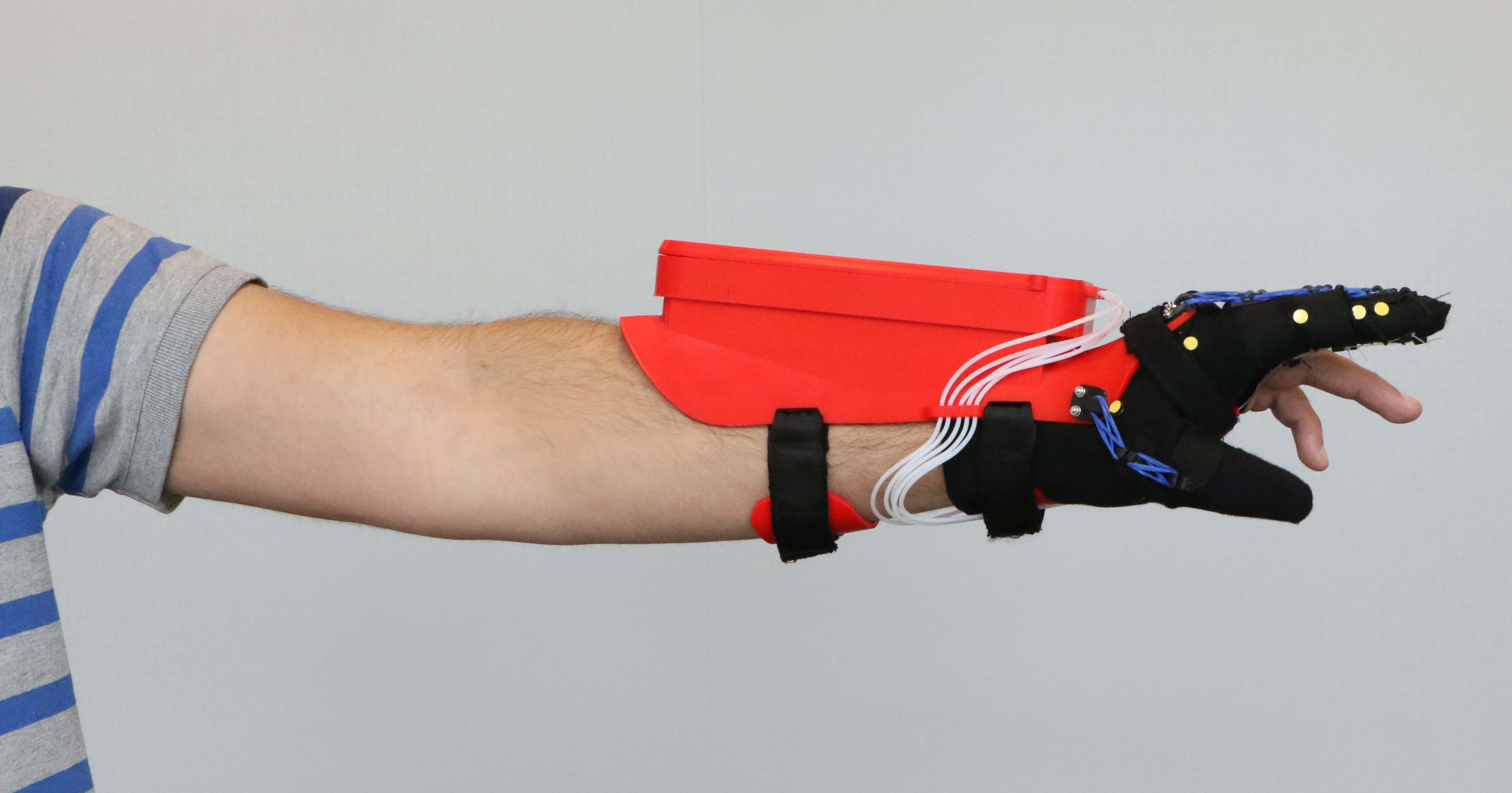
In this project, I designed a wearable device which can be used to actuate hand fingers for patients who lost hand motor functions. The device actuates three fingers: thumb, index, and middle fingers. It uses a cable-driven mechanism to flex the fingers, whereas finger extension is achieved passively using elastic rubber bands.
This work was published in the Robotics and Autonomous Systems Journal. Paper can be found here.
Design Overview
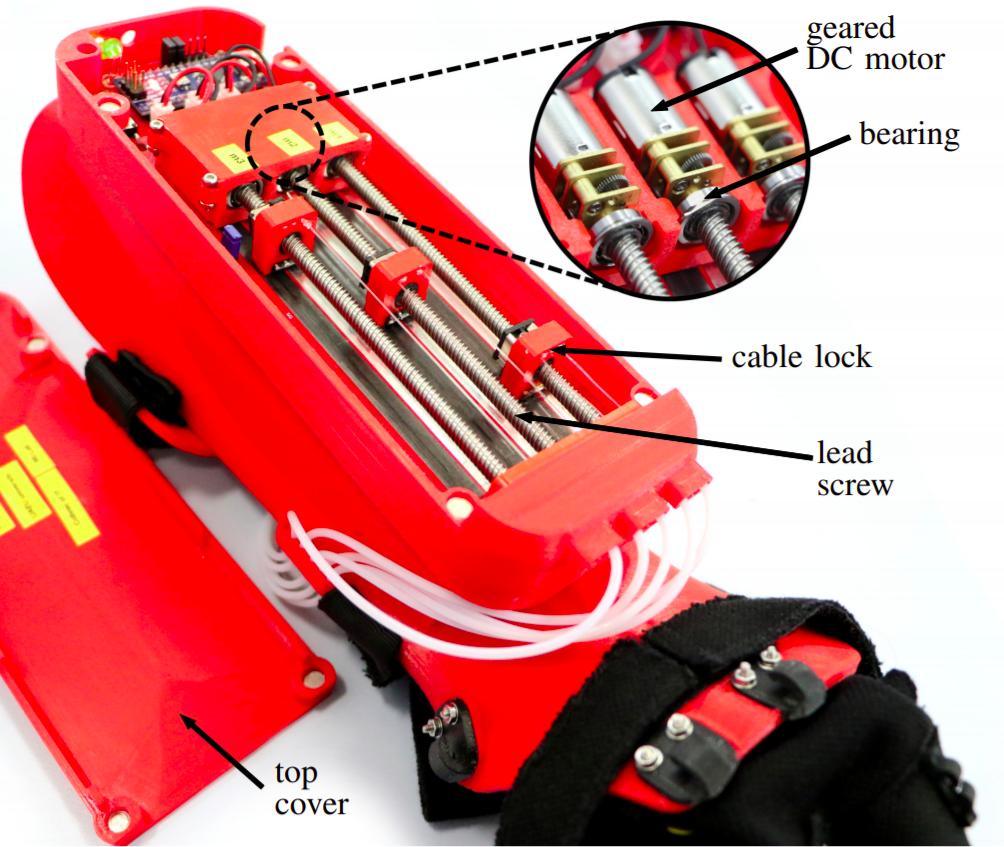
The design is compact consisting of a single unit weighing around 600 g (including the battery). The device height is around 4 cm measured from the forearm. It consists of a fabric glove, three linear actuators, a controller, a rechargeable battery, elastic rubber bands, tendon cables, and cable tubings (bowden tubes), as shown below:
Video
CAD Model
Drag model with your mouse, left-click to pan, and scroll wheel to zoom.